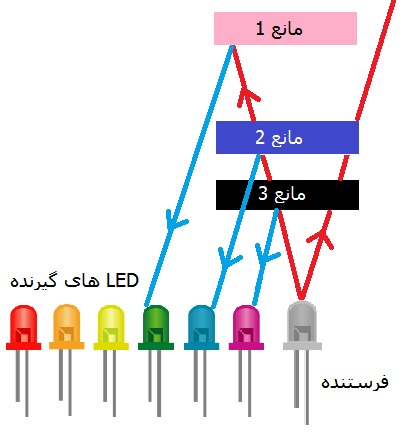
در گذشته گیرنده های IR فلزی شارپ همراه با یک مدار راه انداز و یک یا چند LED مادون قرمز استفاده می شد . این روش ورودی های منطقی ای برای هر LED ( با رسیدن نور به BASE آن ) می فرستاد ( منظور فتوترانزیستورهای گیرنده است ) . این روش یک کلک رشتی بود که به خوبی کار می کرد ولی محدودیت بازه حساسیت داشت و نیز نسبت به تداخل نور محیط حساس بود . بعلاوه به مدار راه انداز ، LED و تعدادی گیرنده نیاز داشت . ادامه در مقاله ...
در این مقاله تفاوت بین دو موضوع تقویت کننده های عملیاتی و مقایسه گر های ولتاژ به شکلی فنی تر مورد مقایسه و بررسی قرار داده شده . این درحالی است که شکل شماتیک و گاها نتیجه نهایی استفاده از این 2 آی سی می تواند مشابه باشد و این عدم آشنایی بین مبتدیان گاها امری طبیعی است .
بهترین متد بهینه سازی خودکار کنترلر PID برای سیستم های صنعتی
Three optimal-tuning PID controller design schemes are presented for industrial control systems in this paper. They are timedomain optimal-tuning PID control, frequency-domain optimal-tuning PID control and multiobjective optimal-tuning PID control. These schemes can provide optimal PID parameters so that the desired system specifications are satisfied even in case where the system dynamics are time variant or the system operating points change. They are applied to three industrial systems, a hydraulic position control system, a rotary hydraulic speed control system and a gasifier, respectively. r 2001 Elsevier Science Ltd. All rights reserved. Read more about بهترین متد بهینه سازی خودکار کنترلر PID برای سیستم های صنعتی
رله چیست ؟ طرز کار رله ، روش راه اندازی ساده رله ها ، مشکلات راه اندازی به روش ساده ، روش راه اندازی پیشرفته رله ها و چندین نکته کاربردی دیگر را در این مقاله می خوانید . نسخه کاربران سطح پایین شامل چکیده و صفحه اول مقاله است . به انضمام چند انیمیشن برای فهم بهتر مطلب : دانلود فایل فشرده انیمیشن های آموزشی رله ها
توضیح پایه ها و عملکرد و نحوه استفاده و کار با آی سی L298 که معمولا به عنوان درایور موتور استفاده می شود .
این آی سی معمولا برای کنترل 2 موتور با میکرو کنترلر یا یک stepper motor استفاده می شود. Read more about درایور موتور l298
در این مقاله اطلاعاتی در مورد یک سنسور موقعیت یاب به شما می دهیم ، سنسوری که رباتهای متحرک با آن قادر به تشخیص اشیاء ، موانع و . . . خواهند بود . یکی از امکانات یک ربات متحرک توانایی آشکارسازی ، کشف و تشخیص اشیاء در محیط اطرافش است . برای رسیدن به این هدف ربات باید به چندین سنسور مجهز باشد؛ البته بینایی توسط پردازش تصویر می تواند انتخاب معمول و متداولی باشد ولی این سنسورها در هر شرایط محیطی کارآمد نیستند ، مثلا ً در مکانهای تاریک ،کثیف ، گرد و غبار و یا حتی زیر آب . در این شرایط حس لامسه برای ربات یک انتخاب مناسب است .Read more about سنسور سیبیل گربه