![]()
![]()
 سمت : مدیر تولید محتوا
سمت : مدیر تولید محتوا
حوزه فعالیت : اپراتوری وب ، نویسندگی ، آموزش و تدوین محتوا ، ترجمه فنی مهندسی ، کسب و کار ، طراحی مکانیک
صفحه تجاری : HappyBot
صفحه شخصی : newview.blog.ir
مدت همکاری با nrec : از سال 1387
تعریف دینامیک ، معرفی مهندسی مکانیک
برعکس استاتیک که مطالعه وضعیت در یک نقطه ثابت در زمان است ، دینامیک مطالعه وضعیت در یک بازه زمانی تعریف می شود . به عبارت خیلی ساده تر استاتیک مطالعه و بررسی چیزهای ساکن و دینامیک مطالعه چیزهایی است که کاری انجام می دهند و در نتیجه حرکت دارند . استاتیک بر مفاهیمی مثل لحظات ، نیرو ، فشار ، گشتاور و ... تمرکز دارد . دینامیک به بررسی جابجایی ، سرعت ، شتاب ، تکانه و ... می پردازد . اگر می خواهید نیروی تولید شده برای حرکت ربات را بهینه سازی کنید یا نیروی مورد نیاز برای حرکتش را اندازه گیری کنید این آموزش به درد شما می خورد . بهتر است قبل از مطالعه این بخش کمی با استاتیک هم آشنا شوید .
جابجایی و سرعت
همه ما می دانیم که سرعت چیست ، اما چطور رباتمان را طوری طراحی کنیم که با سرعت مورد نظر ما حرکت کند ؟ می توانید یک موتور خیلی سریع برای رباتتان بگذارید و امید داشته باشید به اندازه کافی سریع حرکت می کند . ولی اگر بتوانید محاسبه کنید که با سرعت مورد نظرتان حرکت کند می توانید باقی نیروی موتور را برای تامین گشتاور  استفاده کنید . اما چگونه ؟ مثلا برای نمونه تصور کنید ربات چرخ دار شما قرار است دنبال افراد سالمند برود . مطابق تجربه باید بدانید که سالمندان با سرعتی حدود 1 متر در ثانیه راه می روند . حالا باید بفهمید RPM (دور در دقیقه) موتور ربات شما و نیز قطر چرخ هایتان چقدر باشد ، که ربات مراقب سالمند نه ازآن ها عقب بماند و نه جلوتر برود و مثلا داروهای سالمندان گم و گور شود !
استفاده کنید . اما چگونه ؟ مثلا برای نمونه تصور کنید ربات چرخ دار شما قرار است دنبال افراد سالمند برود . مطابق تجربه باید بدانید که سالمندان با سرعتی حدود 1 متر در ثانیه راه می روند . حالا باید بفهمید RPM (دور در دقیقه) موتور ربات شما و نیز قطر چرخ هایتان چقدر باشد ، که ربات مراقب سالمند نه ازآن ها عقب بماند و نه جلوتر برود و مثلا داروهای سالمندان گم و گور شود !
از نظر مفهومی ، زمانی که چرخ ربات شما یک دور کامل می زند ، ربات شما مسافتی معادل محیط چرخ را طی می کند . بنابراین با ضرب کردن محیط چرخ در تعداد دوری که در دقیقه می زند می توانید مسافت طی شده در دقیقه را حساب کنید .
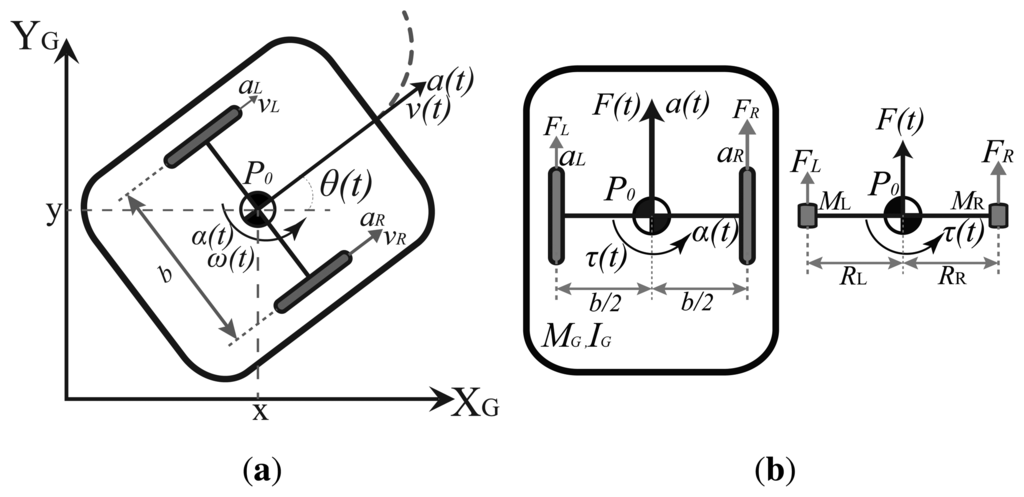
واژه نامه تصویر برای مبتدی ها (آشنایی با زبان فنی رباتیک) :
سرعت = محیط × تعداد دور در دقیقه یا سرعت = قطر × عدد Pi × تعداد دور در دقیقه
یا سرعت = 2 × شعاع × عدد Pi × تعداد دور در دقیقه
برای مثال اگر سرعت چرخش موتور ربات شما 100 RPM یا صد دور در دقیقه باشد ، برای داشتن سرعت 1 متر در ثانیه باید چرخی با قطر زیر داشته باشیم :
100 دور در دقیقه = 100/60 در ثانیه = 1.67
1 متر بر ثانیه = قطر چرخ (متر) × 3.1415 × 1.67 دور در ثانیه (واحد ها در دو طرف معادله باید یکسان باشند)
قطر چرخ = 0.19 متر = 19 سانتی متر
ارتباط قطر چرخ ربات با گشتاور
دقت کنید هر چقدر قطر چرخ ربات بزرگ تر شود یا RPM موتورتان بیشتر باشد ، شما ربات سریع تری خواهید داشت . ولی این مطلب زمانی که پای فاکتور دیگری مثل گشتاور در میان باشد خیلی درست نیست ! اگر ربات شما به گشتاور بیشتری نیاز داشته باشد ، آن را می کشد و در نتیجه ربات نسبت به محاسبات شما کند تر خواهد بود . خیلی سادست ؛ ربات های سنگین تر گشتاور بیشتری لازم دارند . حالا آنچه نیاز دارید این است که مقایسه بین گشتاور موتور ، شتاب و قطر چرخ ربات انجام بدید . شما باید یک تعادل بین این 3 فاکتور ایجاد کنید تا بتوانید گشتاور مناسب برای رباتتان را تامین کنید .
گشتاور موتور و نیرو
 برای هل دادن ربات های دیگر ، بالا رفتن از سربالایی یا ناهمواری های زمین ، یا داشتن شتاب بالا نیروی زیادی احتیاج است . همان طور که در مباحث استاتیکی مطرح می گردد با دانستن قطر چرخ و گشتاور موتور می توانید نیروی رباتتان را به دست آورید .
برای هل دادن ربات های دیگر ، بالا رفتن از سربالایی یا ناهمواری های زمین ، یا داشتن شتاب بالا نیروی زیادی احتیاج است . همان طور که در مباحث استاتیکی مطرح می گردد با دانستن قطر چرخ و گشتاور موتور می توانید نیروی رباتتان را به دست آورید .
گشتاور = فاصله × نیرو فاصله = قطر چرخ گشتاور = قطر چرخ × نیرو
نیرو = قطر چرخ / گشتاور
شتاب
اما شما هم زمان می خواهید حواستان به شتاب هم باشد . برای یک ربات معمولی روی زمین صاف یک شتاب نرمال می تواند چیزی حدود نصف سرعت ماکزیمم باشد . مثلا اگر سرعت ربات شما 100 سانتی متر بر ثانیه باشد شتابی حدود 50 سانتی متر بر مجذور ثانیه خوب است . اما این عدد به چه معناست ؟ نسبت شتاب مفهومی به درد بخور تر است . 100/2=50 . این رابطه می گوید 2 ثانیه طول می کشد تا ربات شما شتاب گرفته و سرعتش به اوج (سرعت ماکزیمم) برسد .
نیرو = جرم × شتاب
فاکتور دیگری هم وجود دارد که موقع انتخاب شتاب باید به آن توجه داشته باشید . اگر ربات شما بخواهد از روی سطح شیب دار یا ناهمواری های سطح زمین بالا برود نیاز به شتاب بیشتری برای مقابله با جاذبه دارد . اگر ربات بخواهد از دیوار صاف بالا برود شتابی معادل 9.81 متر بر مجذور ثانیه نیاز دارد که معادل نیروی کشش زمین به سمت پایین (نیروی جاذبه) است . شتابی برای خنثی کردن . یک شیب 20 درجه شتابی معادل 3.35 متر بر مجذور ثانیه برای غلبه بر جاذبه نیاز دارد .
حالا چگونه شتاب بیشتر برای شیب های خاص را محاسبه کنید ؟
شتاب برای غلبه بر شیب = 9.81 متر بر مجذور ثانیه × 180 / (عدد Pi / زاویه شیب) Sin
شما باید این مقدار شتاب را به شتاب حالتی که روی زمین صاف داشتید اضافه کنید .
دقت داشته باشید ، شتاب و گشتاور موتور ثابت نیستند . با افزایش سرعت چرخش موتور شتاب کاهش می یابد . البته این مسائل خیلی به موتور ربط دارد . در این آموزش سعی شده بیشتر فرمول ها ساده سازی شود .
فاکتور موتور ربات Robot Motor Factor
این عامل که آن را به اختصار RMF می نامیم را خودمان ساخته ایم و خیلی رسمی نیست ! :) این در واقع یک فرمول است که خیلی ساده شده تا شما راحت و سریع بتوانید موتور مناسب را برای ساخت رباتتان بهینه سازی و انتخاب کنید . در حقیقت ما تمام فرمول های بالا را در یک معادله بزرگ تر جمع کردیم که به شکل یک جا از آن استفاده می کنید تا موتور مناسب را پیدا کنید .
دور در ثانیه × گشتاور > = (Pi×2) / ( جرم × شتاب × سرعت )
RMF = دور در ثانیه × گشتاور
برای نمونه موتور های زیر موجود است :
| نمونه موتور ها | گشتاور N.m نیوتن متر | دور چرخش rps / دور در ثانیه | RMF |
|
موتور A |
2.7 | 1 | 2.7 |
|
موتور B |
3.4 | 2 | 6.8 |
|
موتور C |
2.7 | 4 | 10.8 |
حالا اگر بخواهید ربات شما سرعتی معادل 1 متر بر ثانیه و شتابی حدود 0.5 متر برمجذور ثانیه داشته باشد و وزن رباتتان مثلا 2.5 کیلوگرم باشد ، RMF این موتور ها خواهد شد :
