انواع و اقسام مختلفی از چرخ ها در بازار وجود دارد . اما هنگامی که چرخی برای ربات خود انتخاب می کنید باید به فکر برنامه ای برای کنترل آن چرخ نیز باشید . در این نوشتار به بررسی مکانیزم دیفرانسیلی جهت کنترل و هدایت ربات می پردازیم .
مکانیزم کنترلی دیفرانسیلی :
 این مکانیزم کنترل ربات رایج ترین نوع مکانیزم های ربات به ویژه برای تازه کارهاست . مفهوم این مکانیزم نسبتاً ساده تر است . تفاوت سرعت بین دو موتور ربات را در مسیر و جهت مورد نظر هدایت می کند . نام گذاری این روش نیز به همین تفاوت سرعت بر می گردد . (Velocity difference) واژه difference به معنای اختلاف و تفاوت ، که Differential از آن گرفته شده و به معنای اختلاف یا تغییرات است .
این مکانیزم کنترل ربات رایج ترین نوع مکانیزم های ربات به ویژه برای تازه کارهاست . مفهوم این مکانیزم نسبتاً ساده تر است . تفاوت سرعت بین دو موتور ربات را در مسیر و جهت مورد نظر هدایت می کند . نام گذاری این روش نیز به همین تفاوت سرعت بر می گردد . (Velocity difference) واژه difference به معنای اختلاف و تفاوت ، که Differential از آن گرفته شده و به معنای اختلاف یا تغییرات است .
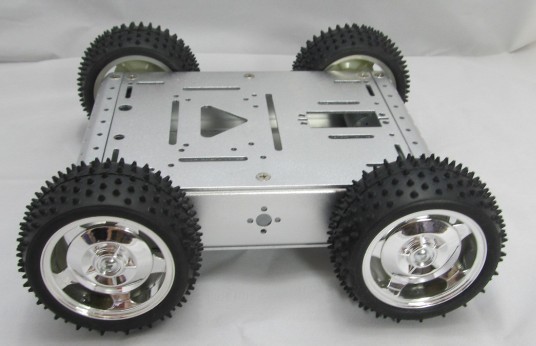
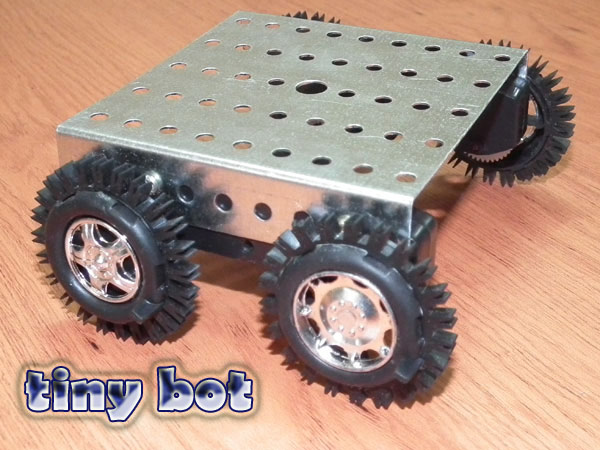
در این مدل مکانیزم ربات می تواند دو چرخ مستقل داشته باشد و یا دو چرخ اصلی با محور افقی که هر یک به وسیله یک موتور مجزا حرکت می کند و یک چرخ غلتکی که به عنوان هرزگرد و به منظور حفظ تعادل به کار می رود ، در برخی موارد نیز بسته به نیاز ممکن است ترمز هم داشته باشد . پس بخش اصلی این مکانیزم شامل موارد زیر است : Read more about مکانیزم کنترل ربات دیفرانسیلی

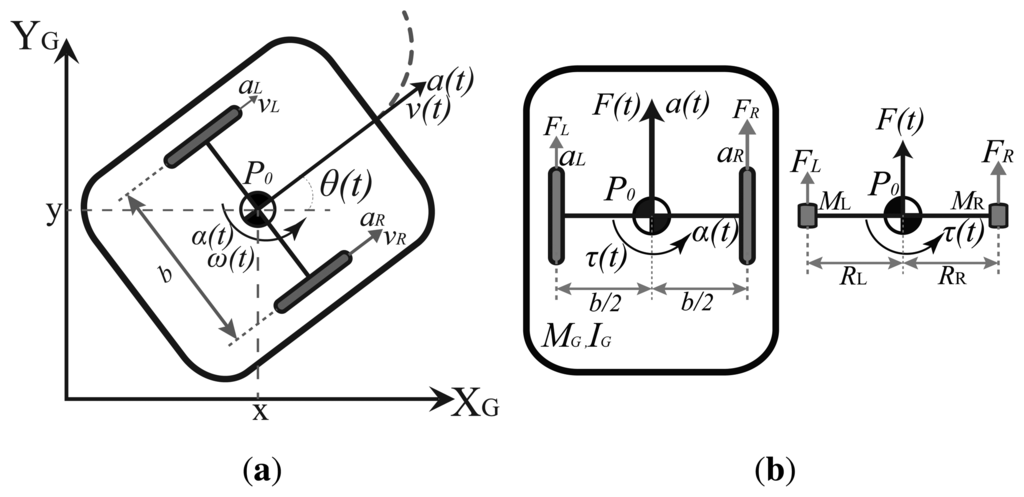
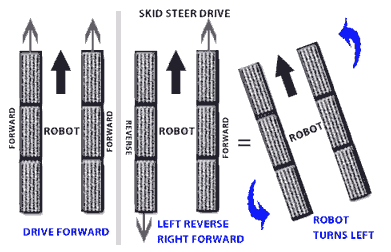 در این روش فقط یک طرف ربات چه چرخ باشد و چه شنی تانکی تحت کنترل است و طرف مقابل با سرعت متفاوت چرخانده می شود تا مسیر ربات تعیین شود . اگر شما مفهوم کنترل دیفرانسیلی ربات را به خوبی دریافته باشید مکانیزم تانکی نیز دقیقاً به همان صورت است . در ربات دیفرانسیلی یک چرخ هرزگرد برای حفظ تعادل ربات وجود دارد که در سیستم تانکی با دو چرخ جایگزین می شود . حالا تصور کنید که نیاز به چرخش ربات به سمت چپ باشد در این صورت شنی یا چرخ ها سمت چپ باید به سمت عقب حرکت کند و شنی یا چرخ ها راست به جلو برود تا ربات به چپ بچرخد .
در این روش فقط یک طرف ربات چه چرخ باشد و چه شنی تانکی تحت کنترل است و طرف مقابل با سرعت متفاوت چرخانده می شود تا مسیر ربات تعیین شود . اگر شما مفهوم کنترل دیفرانسیلی ربات را به خوبی دریافته باشید مکانیزم تانکی نیز دقیقاً به همان صورت است . در ربات دیفرانسیلی یک چرخ هرزگرد برای حفظ تعادل ربات وجود دارد که در سیستم تانکی با دو چرخ جایگزین می شود . حالا تصور کنید که نیاز به چرخش ربات به سمت چپ باشد در این صورت شنی یا چرخ ها سمت چپ باید به سمت عقب حرکت کند و شنی یا چرخ ها راست به جلو برود تا ربات به چپ بچرخد .