![]()
![]()
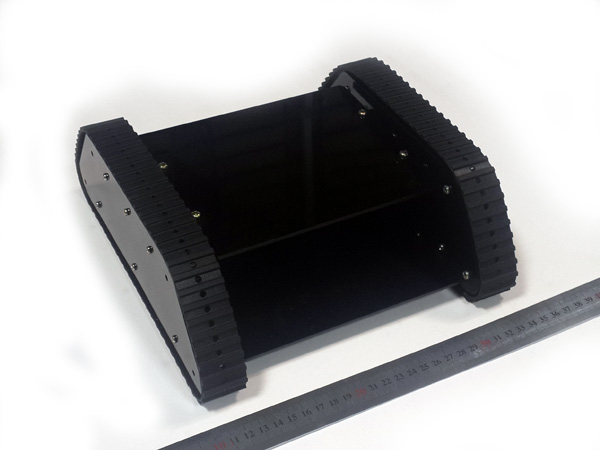 یکی از مکانیزم های دیگر ربات ها که نسبتاً پرکاربرد است نوع تانکی است که معمولاً برای ربات های مین یاب ، امداد گر ، تپه نورد و شبیه به این به کار می رود . در این مکانیزم ممکن است هم از تسمه و زنجیر (شنی تانکی) و هم از تعدادی چرخ در ساخت ربات استفاده شود و از مفهوم دیفرانسیل برای کنترل آن بهره برد . رایج ترین سیستم های تانکی بولدوزر ها و ماشین های حمل سوخت هستند .
یکی از مکانیزم های دیگر ربات ها که نسبتاً پرکاربرد است نوع تانکی است که معمولاً برای ربات های مین یاب ، امداد گر ، تپه نورد و شبیه به این به کار می رود . در این مکانیزم ممکن است هم از تسمه و زنجیر (شنی تانکی) و هم از تعدادی چرخ در ساخت ربات استفاده شود و از مفهوم دیفرانسیل برای کنترل آن بهره برد . رایج ترین سیستم های تانکی بولدوزر ها و ماشین های حمل سوخت هستند .
| اجزاء اصلی مکانیزم ربات تانکی | |
| اجزاء | تعداد |
| موتور | 2 |
| چرخ (بدون تسمه ، زنجیر یا شنی) | 4 یا بیشتر |
| تسمه ، زنجیر یا شنی | 2 |
| پلتفرم (صفحه شاسی ربات) - بدنه ربات | 1 |
| هرزگرد (در صورت نیاز به حفظ تعادل) | ندارد |
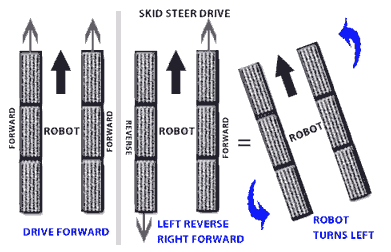 در این روش هر طرف ربات چه چرخ باشد و چه شنی تانکی ، حرکتش تحت کنترل یک موتور مستقل است و طرفین با سرعت متفاوت چرخانده می شوند تا مسیر ربات تعیین شود . اگر شما مفهوم کنترل دیفرانسیلی ربات را به خوبی دریافته باشید مکانیزم تانکی نیز دقیقاً به همان صورت است . در ربات دیفرانسیلی یک چرخ هرزگرد برای حفظ تعادل ربات وجود دارد که در سیستم تانکی با دو چرخ جایگزین می شود . حالا تصور کنید که نیاز به چرخش ربات به سمت چپ باشد در این صورت شنی یا چرخ ها سمت چپ باید به سمت عقب حرکت کند و شنی یا چرخ ها راست به جلو برود تا ربات به چپ بچرخد .
در این روش هر طرف ربات چه چرخ باشد و چه شنی تانکی ، حرکتش تحت کنترل یک موتور مستقل است و طرفین با سرعت متفاوت چرخانده می شوند تا مسیر ربات تعیین شود . اگر شما مفهوم کنترل دیفرانسیلی ربات را به خوبی دریافته باشید مکانیزم تانکی نیز دقیقاً به همان صورت است . در ربات دیفرانسیلی یک چرخ هرزگرد برای حفظ تعادل ربات وجود دارد که در سیستم تانکی با دو چرخ جایگزین می شود . حالا تصور کنید که نیاز به چرخش ربات به سمت چپ باشد در این صورت شنی یا چرخ ها سمت چپ باید به سمت عقب حرکت کند و شنی یا چرخ ها راست به جلو برود تا ربات به چپ بچرخد .
طبق روابط ربات های دیفرانسیلی اگر در شعاع صفر ربات تانکی حرکت کند به اندازه 360 درجه می چرخد . تصور کنید به هر طرف بدنه ربات 3 چرخ متصل شده باشد و برای چرخش ربات ، چرخ های جلویی و عقبی ربات با سرعت بیشتری بچرخد و چرخ های وسطی ترمز کرده و بلغزند . این مکانیزم همان مکانیزم تانکی است .
برخی از مزایای استفاده از سیستم کنترل ربات تانکی :
معایب مکانیزم کنترل ربات تانکی :
این هم مدلی از شکل چرخ دار این مدل مکانیزم است که 3 چرخ در هر طرف تنها با یک موتور هدایت می شوند :

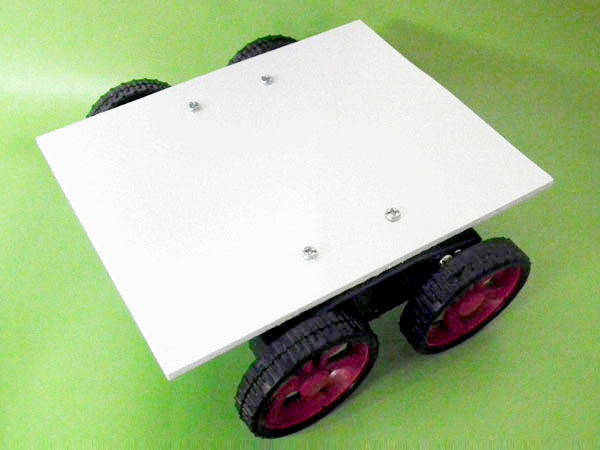
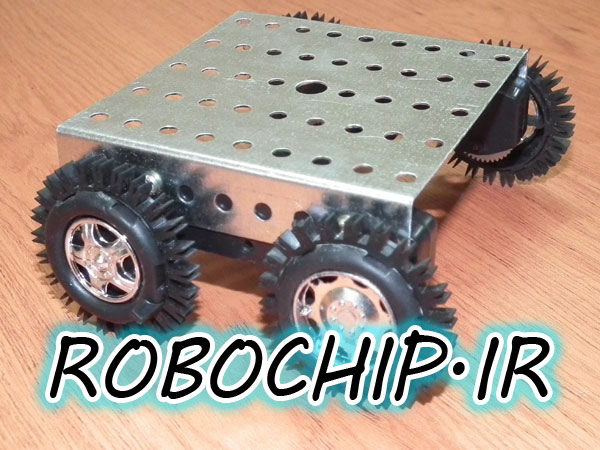
نمونه های چرخ دار دیگر که با قیمت ارزان در بازار موجود است :