![]()
![]()
یک ناوگان از کارگر ساختمانی رباتیک را تصور کنید که بطور مستقل و بدون نظارت و یا تعیین وظیفه خاصی می توانند ساختمان بسازند . محققان بخش مهندسی و علوم کاربردی در دانشگاه هاروارد و مهندسی الهام بیولوژیکی (BIE) از موسسه Wyss در هاروارد و دانشگاه کمبریج نوعی خاص از کارگران رباتیک را طراحی نمودند . مهندسان این ربات ها را با الهام از ملیون ها موریانه ای که بدون نقشه و طرح اولیه خاک ریزی پیچیده را با ذرات خاک با همکاری هم می سازند ، طراحی کرده اند .
محققان می گویند اعضای کلونی از نشانه های یکدیگر و محیط اطرافشان برای پیشبرد پروژه ساختمانی کمک می گیرند . ما فهمیدیم این حشرات کوچک قادرند چیزهای باور نکردنی بسازند که واقعا باید گفت بی نظیره !
حالا چطور باید ربات هایی بسازیم و برنامه ریزی کنیم که شبیه به این موریانه ها کار کنند ، منتها چیزی را که ما انسان ها می خواهیم بسازند ؟
کارگران ساختمانی انسانی معمولا در یک سیستم سلسله مراتبی کار می کنند که یک سرکارگر کارگرها را برای پیاده سازی جزئیات برنامه کاری مدیریت می کند .
وِرفل از محققین این پروژه می گوید : در کلونی های حشرات این طور نیست که ملکه دستورالعمل هر فرد را جداگانه به او ابلاغ کند . موریانه ها نمی دانند که بقیه کارگرانِ هم نوعشان چه کاری انجام می دهند و یا روی هم رفته اوضاع ساختمانی تا کجا پیش رفته است .
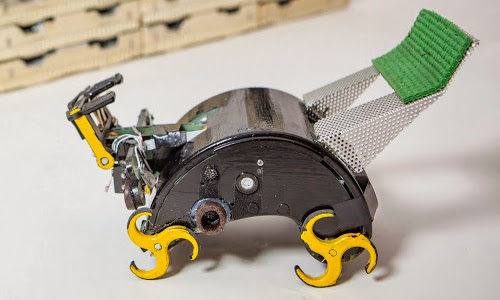
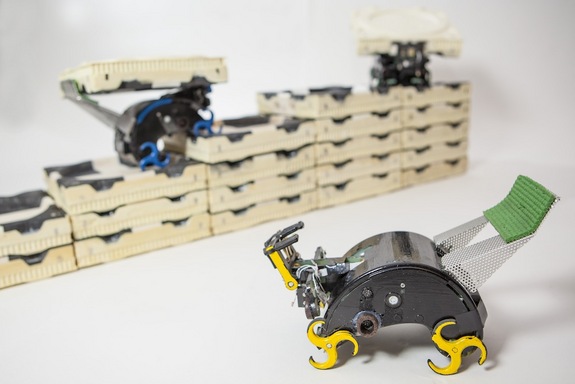
محققان چهار سال زمان برای طراحی و ساخت یک تیم کوچک از ربات های کارگر ساختمانی زمان صرف کرده اند ، که TERMES نام دارد . این ربات ها می توانند با استفاده از آجر هایی از جنس فوم سازه هایی پیچیده نظیر سازه های سه بعدی ، برج ، قلعه و هرم بسازند . هر ربات بخشی از پروژه ساخت و ساز را بطور موازی با هم تیمی هایش انجام می دهد ولی هیچ رباتی برنامه از پیش تعیین شده ندارد . این بدین معنی است که اگر یک ربات مشکل فنی پیدا کند یا نخواهد کار کند پروژه ساخت و ساز متوقف نمی شود .
ربات ها به سنسورهایی مجهز شده اند که وجود آجر ها یا ربات های دیگر را در مسیر شناسایی می کنند . اگر رباتی یک آجر را شناسایی کند می تواند آن را جابجا کند و آن را در یک نقطه از دیوار سایت ساختمانی جا دهد .

ربات ها برنامه ریزی شدند تا در طول یک شبکه جابجا شوند و از قوانین ترافیکی تبعیت کنند و آجر ها را بر اساس ساختاری خاص جانمایی کنند .
ترافیک می تواند تنها در یک جهت بین دو سایت پروژه مجاور که یک سری از ربات ها و مصالح ساختمانی در طول ساختمان جابجا می گردد تعریف شود . برنامه بررسی امنیتی ربات را درگیر این می کند که خیلی سریع دور تا دور خود را رصد کند تا ببیند آجر ها کجا قرار گرفتند و بقیه همکارانش کجا هستند و دیگر اینکه از رضایت بخش بودن شرایط محیط کار مطمئن شوند .
محققان می گویند : این نوع خرد جمعی ابزاری برای پیاده سازی پروژه های ساخت و ساز با 5 ربات و یا گروه های کارگری خیلی بزرگ تا 500 ربات است . در آینده سیستم های رباتیک مشابه می تواند برای اجرای پروژه های ساختمانی که برای انسان خطرناک است یا کارهای ساختمانی ساده در مریخ به کار گرفته شود . ورفل درباره این پروژه می گوید : این پروژه تا هدف نهایی خود فاصله زیادی دارد اما در طول مسیر می تواند برای اهداف کوتاه مدت تری مثل گذاشتن کیسه های شن در مسیر وقوع سیل به کار رود .
محققان می گویند این ربات ها باید با یک سیستم کنترل کننده مرکزی هماهنگ شوند . برای مثال وقتی ربات ها در محل های خطرناک یا دور از دسترس حرکت می کنند بهتر است یک انسان به عنوان ناظر میزان پیشرفت و کارایی کارگران ساختمانی رباتیک را بررسی کنند .

2 نظر on "طراحی ربات های کارگر با الهام از موریانه "