![]()
![]()
خیلی وقت پیش مطلبی در همین خصوص با همین عنوان نوشتم و گفتم ادامه خواهد داشت ، دیر یا زود بالاخره فرصت فراهم شد تا در جهت ساخت اولین ربات شما مجدداً مطالبی در این جا ارائه شود .
در این مجال می خواهیم کمی روی مکانیک اولیه ربات بحث کنیم و چیز قابل قبولی که در بازار هم به سادگی و نسبتا ً ارزان پیدا می شود را برای این منظور به کار بگیریم . به هر حال شما هم نباید برای اولین ربات بی ملاحظه باشید و دست توی جیب پدر و مادر ها کنید و بدون دقت خرج کنید . اگر بخواهید در دنیای رباتیک کار کنید باید کمی هزینه های خودتون رو هم مدیریت کنید . اگر در بخش مکانیک صرفه جو باشید و سعی کنید خلاقیت به خرج دهید می توانید روی بخش الکترونیک که حساس تر است بیشتر سرمایه گذاری کنید .
طراحی کنید . بهتره اول اونچه در ذهنتون هست رو روی کاغذ یا در کامپیوتر - با هر کدام راحت ترید - ترسیم کنید . به تمام جزئیات فکر کنید و اون ها رو روی طرحتون پیاده کنید . مثل :
مثل تصویر زیر که البته با یک نرم افزار طراحی دو بعدی مثل AutoCad یا SolidWorks کشیده شده .
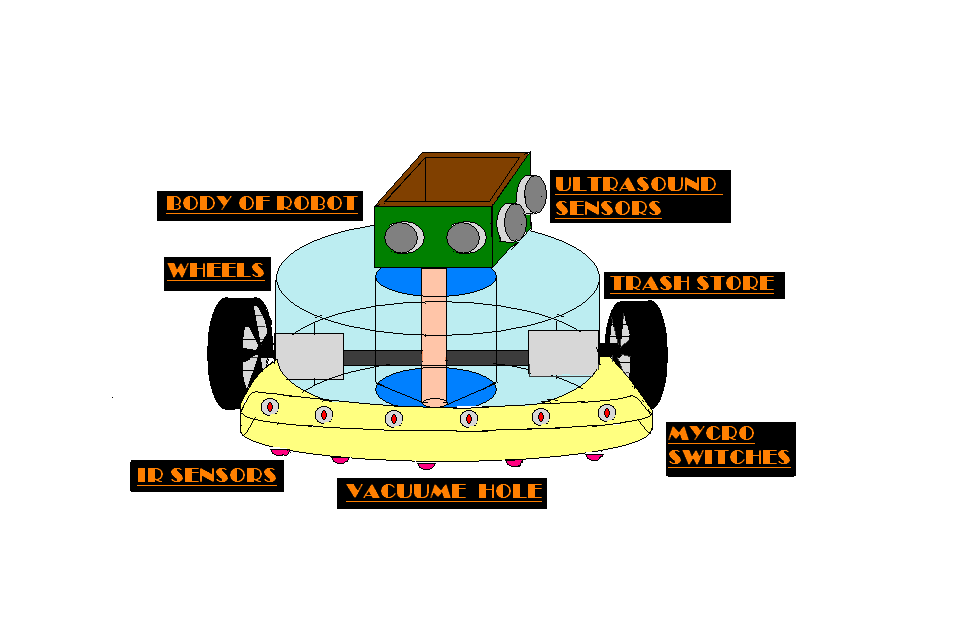
یا تصویر زیر که طرح نقاشی شده از یک ربات جاروبرقی (sweeper) در نرم افزار paint است . همانطور که می بینید شاید این کار خیلی حرفه ای نباشد اما به شما کمک می کند تا ذهن آماده تری برای ساخت یا رفع عیوب مکانیک ربات خود داشته باشید .
در ادامه باید سعی کنید قطعات ساده تر و کمتری انتخاب کنید و مکانیزم حرکتی خودتون رو با استفاده از موارد اضافی خیلی پیچیده نکنید . هر چقدر مکانیک شما سنگین تر و پیچیده تر باشد در بخش کنترل با دردسر های بیشتری مواجه می شوید ، بعلاوه هزینه بیشتری هم برای سردرگمی بیشتر خودتون باید بپردازید . ضمن اینکه ممکن هست برای ساخت یک مکانیک فوق پیچیده نیاز به ابزارهایی داشته باشید که خیلی گران یا خارج از دسترس باشند یا ساختنش خیلی سخت باشد . خلاصه همه این پاراگراف رو در یک جمله مختصر می کنم : " قطعات ساده تر و کمتر یعنی شانس کمتر برای اشتباه در طراحی شما " - طرز فکری را که قبلا ً یاد گرفتید دوباره یادآوری می کنم : (!Keep It Simple, Stupid) ساده و احمقانه در نظر بگیرید .
سعی کنید برای بستن اتصالات از یک نوع پیچ استفاده کنید . چون برای مونتاژ کردن نیاز به ابزار کمتری هست . مثلا ً همه پیچ ها دوسو باشند ، آنگاه تنها نیاز به یک پیچ گوشتی دو سوی متوسط دارید .
نصب قطعات به یکدیگر ؛ اینکه چه چیزی را در کدام قسمت بدنه وصل کنید مربوط می شود به چند شاخصه فیزیکی مثل : وزن قطعه و کل بدنه ، اندازه ، کار قطعه ، جابجایی و ... . برخی موارد به شکل تجربی حاصل می شود ، مثلا ً شما ربات خود را می بندید و متوجه می شوید وزن باتری به یک طرف بیشتر فشار می آورد و ربات تعادل ندارد ، پس جای آن را با آزمون و خطا درست می کنید . یا مثلا ً چرخ ها هنگام حرکت به قسمتی از شاسی ربات گیر می کند و آن را اصلاح می کنید .
وقتی چرخ هاتون رو می سازید یا می خرید حتما ً به موتورهاتون توجه کنید . ابتدا گشتاور و سرعت را بررسی می کنیم . چرخ هایی با قطر بزرگ به شما گشتاور کوچک و سرعت بالا می دهند چون در هر دور مسافت بیشتری را طی می کنند ( برابر با محیط چرخ ) . اگر موتورهای پر قدرتی دارید بهتر است از چرخ هایی با قطر بزرگتر استفاده کنید . معمولا ً موتورهای سِروُ گشتاور زیادی دارند بنابراین بهتر است از چرخ های بزرگ در کنار آنها استفاده شود . اگر موتورهای ضعیفی دارید ( مثلا ً اگر موتور شما گیربکسی ندارد ) از چرخ های کوچکتر استفاده کنید . در این صورت ربات آهسته تر حرکت می کند اما حداقل برای عبور از بلندی ها گشتاور کافی دارد . منظور از بلندی پله یا تپه نیست مثلا ً در صورت عبور از روی فرش روی برجستگی ها و ناهمواری های مسیر گیر نمی کند .
یک اشتباه دیگر افراد در خرید چرخ ربات این است که به قطر موتور توجه نمی کنند و قطر چرخ تقریبا ً برابر یا کوچکتر از قطر موتور است . مثلا ً :
قطر چرخ : 5cm
قطر موتور : 5.5cm
0.5 - = 5.5 - 5 = قطر موتور - قطر چرخ
فضای خالی بین چرخ و موتور = 0.5/2 = 0.25
در این مثال که مقطع چرخ از موتور کوچکتر است عدد منفی شده است و چرخ اصلا روی زمین قرار نمی گیرد ، تصور کنید ! مثال بعد :
قطر چرخ : 6cm
قطر موتور : 5.5cm
0.5 + = 5.5 - 6 = قطر موتور - قطر چرخ
فضای خالی بین چرخ و موتور = 0.5/2 = 0.25
در این مثال قطر چرخ > قطر موتور و ربات می تواند از روی جسمی به بلندی 0.25 به سادگی عبور کند . البته موتور هایی که گیربکس بزرگتر از بدنه اصلی موتور است یا یکپارچه نیستند باید به جای قطر موتور ارتفاع گیربکس را متناسب با فیزیک آن در رابطه قرار داد .
بافت چرخ : معمولا ً تازه کار ها به بافت چرخ خیلی اهمیت نمی دهند اما دقت کنید اگر روی چرخ خیلی صاف و صیقلی باشد اصطکاک لازم را نخواهیم داشت و ربات موقع سرعت رفتن یا ترمز گرفتن روی زمین می لغزد . معمولا ً چرخ های omni پلاستیکی این مشکل را دارند و بهتر است در این موارد رویه چرخ ها را با لاستیک یا بادکنک ضخیم بپوشانیم .
اگر چرخ شما رویه خشن و زبری داشته باشد مثل فوم ها ، اصطکاک با زمین زیاد شده و بازدهی کم می شود .
پهنای چرخ : نباید خیلی پهن باشد چون مقاومت اضافی را به چرخش چرخ روی زمین اضافه می کند ( چرخیدن سخت می شود ) .
آخرین نکته در مورد چرخ هم نحوه اتصال به موتور است . دقت شود قطر شفت خروجی موتور ها با قطر سوراخ چرخ یکی باشد . برخی چرخ های حرفه ای تر تبدیل هایی برای اتصال دارند .
خُب تا همین جا کافیه ! در بخش های بعدی کمی درباره محاسبات مکانیکی موتور و چرخ و نحوه اتصال چرخ های خاص صحبت می کنیم .
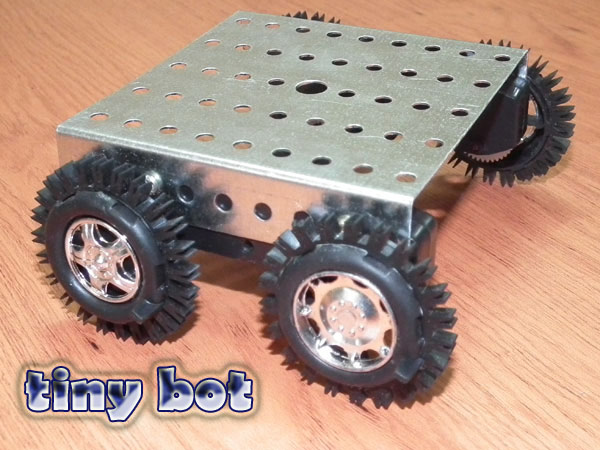
در پایان یک شاسی ارزان قیمت و ساده برای شروع ساخت ربات بهتون معرفی می کنم که می تونه گزینه خوبی برای شروع کار باشه .
چطور می تونم این شاسی رو تهیه کنم ؟
البته اگه یه کم هوس کرده باشید کار کردن با ابزار هایی مثل دریل و ... رو تجربه کنید
این بدنه قابلیت های خوبی به شما می دهد

10 نظر on "چگونه اولین ربات خود را بسازید ؟ (2)"